カメラによって3次元の世界を「写真」という2次元空間に写し取る原理はごく単純です。
ピンホールカメラをご存じでしょうか。
壁(薄くて不透明)に、小さい穴をあけ、その穴だけを通して壁の向こうの景色を見ると考えます。
いろいろな位置から穴をのぞき込むと、目と穴を結ぶ直線が「景色」と交わる点の色が見えます。ここで目と壁の間に透明なシートを置き、見た点のシート上の位置に、見えたのと同じ色を塗っていきます。シートに隙間無く色が塗れれば、壁を取り払ってみた「景色」が写し取られます。
実物のカメラでは、ピンホールカメラで得られる像の暗さや解像度の限界を超えた画質を得るために、複数のレンズを組み合わせて高画質化していますが、原理は同じです。
シートの裏から穴をのぞいてみましょう。シート上の点の色は、その点と穴を結んだ直線が「景色」と交わる点の色と同じです。仮に景色が全くの白色だったとしましょう。そのとき、シート上の点から穴を通して「白色の景色」と交わる点について、シート上の点の色を塗るとどうなるでしょうか。シート上のすべての点について「白色の景色」を塗りつぶすと、もとの景色の色になっているはずです。(コンピュータグラフィックに詳しい方は、レイ・トレーシング法を思いうかべていただけると理解できると思います。)
実際には「白色の景色」を用意するのは大変です。コンピュータ上に3次元の世界のものの形をすべてデータで用意しなくてはなりません。(実物で「白色の景色」を作成して画像を投影する手法は、プロジェクションマッピングとして最近注目を浴びていますが、本題からそれるので、ここでは割愛します。)
写真が撮影された位置と向き(=カメラの位置と方向)がわかれば、現場を撮影した写真を上で述べたシートとして用いることで、撮影された時点での現場の状況が再現できます。これが逆カメラ法の原理です。
完全な3次元の世界にある景色を再現するためには、「白色の景色」を用意しないとなりません。しかし事故現場において、正確な「白色の景色」を再現するのは実務的には不可能です。
ただし、道路における交通事故において、最も重要な証拠は路上に残された痕跡です。ブレーキの開始/終了位置、破片の飛んだ位置、部品が道路を削った位置、血痕の位置等、これらの位置関係、つまり距離や方向が事故再現の鍵となります。
そこで、実用上は「白色の景色」を平らな道路面と仮定して、逆カメラ法を適用します。
以下は簡単な例です。平らな路面が正方形に区切られており、そのなかの2マスに弊所の鷹頭の絵が描かれているとします。
中央の列に向かって立ち、路面を見下ろすように撮影すると、図1のような写真が撮れるはずです。
 |
| 図1:路面を撮影 |
中央の列、手前から2枚目のマス目(青背景の鷹頭画像)に注目します。図1の写真の後ろに決まった視点を想定します。視点とマス目の四隅を通る直線によって、路面と交わる四点が決まります。マス目は正方形であることから、「写真と路面のなす角度が定まり」かつ「視点から写真までの距離と、視点から路面までの距離の『比』が定まり」ます。
視点から、写真上の点を通って路面に到達する直線を考え、路面上に写真上の点と同じ色を配置します。つまりも路面に「写真をスライドとして投影」します。
すると、路面に映る画像は、図2のようになります。
 |
| 図2:逆カメラによる投影 |
青背景の鷹頭があるマス目が正方形になるように変換すると、他のマス目、たとえば黄背景の鷹頭画像も正方形になります。つまり、逆カメラ法を使うと、道路を斜めに撮影した写真から【道路を真上から撮影した写真】を得ることができます。
長さの基準にできるものが写っている写真さえ残っていれば、痕跡の長さ・位置・方向が再現できるわけです。
図1~2のように被写体に対してまっすぐでなくてもかまいません。
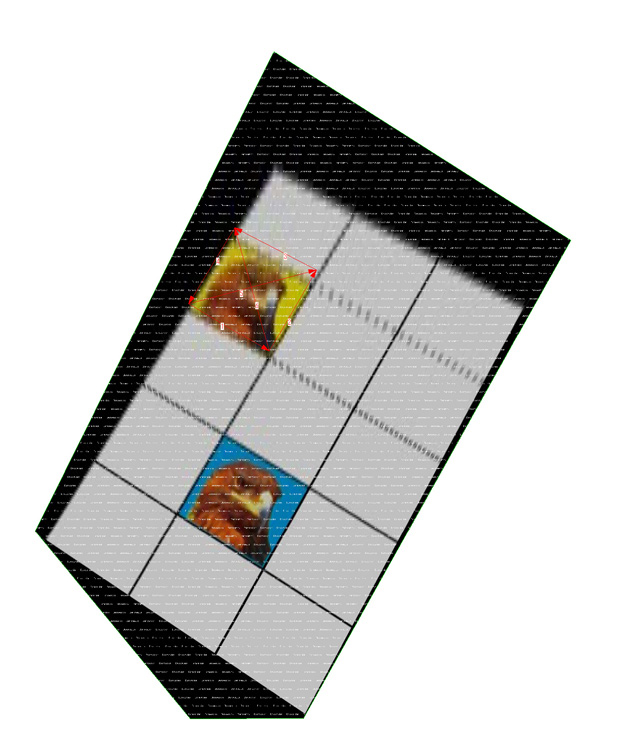
たとえば、図3のように斜め方向から、カメラも傾いて写された写真があったとします。
 |
| 図3:傾いた写真 |
このような写真であって、さらに奥のマス目(黄背景の鷹頭画像)しか正確に測定できていなかったとしても
 |
| 図4:図3を拡大 |
 |
| 図5:傾いた写真からの再現 |
次回は具体的な例で説明します。